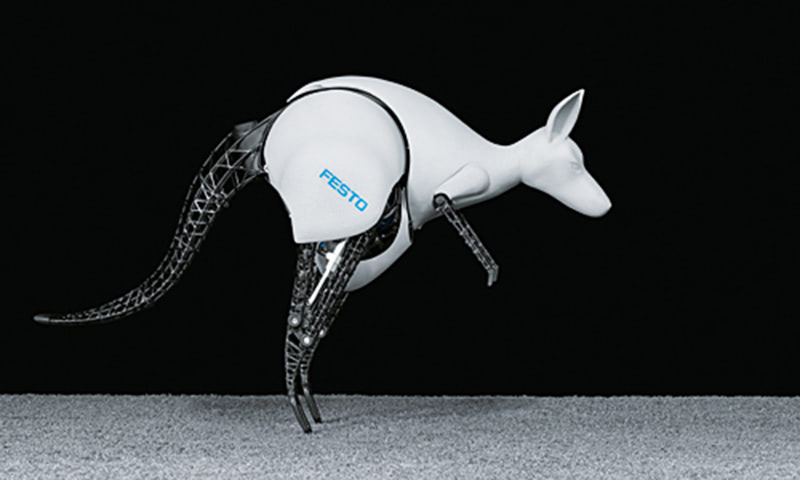
Zoomorphic designers at Festo, whom you might know for the robot penguins, have technologically reproduced the unique way a kangaroo moves.
The fully automated robotic kangaroo, has the ability to efficiently recover the energy when jumping, store it and use it for the next jump, just like the real animal. In fact, its energy-efficient jump kinematics is based on the natural model.
The robot is commanded by gestures, allowing the controller to beckon the kangaroo from across the room. The movements are recognized by a band worn on the operator arm, enabling human-bionic kangaroo interaction.
The BionicKangaroo is a good example of how to learn from nature and implement that information into robotics and automation. This has proven to be a success with another Festo creature, the Bionic Seagull, used for wind energy harvesting system. The same concept could be used to design more energy efficient machines in future.
Source: Wired
Share your thoughts and join the technology debate!
Be the first to comment